
Inspection Arm
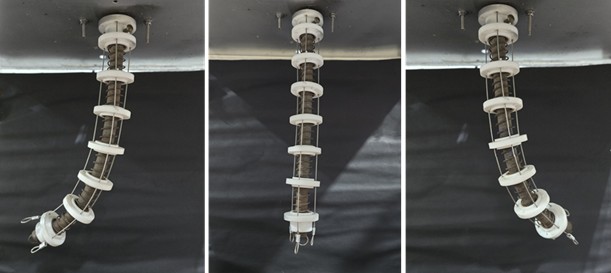
Hyper-Redundant Inspection Arm
This working model shows the working of a hyper-redundant inspection arm. This arm does not have its actuator motors mounted on the arm, and the motion of 3-degrees of freedom of the arm is controlled by wires. This, coupled with VR can be used for real-time inspection of inside the tokamak machine.
|

© IPR, 2017-18
Home Academic Visits | IPR Outreach | Comic Book | Exhibition Hall | Plasma Exhibition | People | Resource Materials | Social Outreach | Solar Telescope | Training Program | TokoToy | Vigyan Samagam | 2022 Events | 2023 Events | 2024 Events | 2025 Events | 2026 Events | Upcoming Events | FAQ FAQ | Contact Contact | Ask A Question Ask A Question | Talk 2 Us Interact with a Plasma Scientist |